Back talking about the Harley LiveWire, I commented that the bike, along with the Zero SR, didn’t seem to pull as hard as my PMDC-equipped bike right off the line. Read: Wheelies. I love me the wheelies. So I got to thinking about the whole equation – motor types, starting torque, all that stuff. One disclaimer though – my bike was running RC lipo, dumping huge amps, and was really light. However, a mutually exclusive disclaimer, a buddy of mine has an AC20 bike also running RC lipo, is very light, and also has that AC-motor off the line, well, lag.
So it begs the question: does an AC motor have to spin up a bit before it develops full torque? Which begs a bigger question: what are the typical characteristics of various types of motors? I ask this because one of the quickest drag bikes on the planet is running series-DC.
The four basic types of motors I’m interested in are “permanent magnet DC” (PMDC), AC in general, but while we’re there, let’s look at the difference between “induction AC” and “synchronous AC”, and finally my drag-racing buddy’s “series DC” motors.
Once you dig into it, it appears that’s exactly what’s going on – an AC motor, because it needs to spin up to develop a field, doesn’t actually pull all of the torque it’s capable of at 0 RPM. A PMDC motor does crank out high torque at zero, because the fields are already there by virtue of the magnets, and a series-DC motor, because of the way the fields are generated, can spool up starting torque like a bitch, if you want it to. By the way… any of these motors develop several times their “rated torque” at start-up, according to these sources, to break the stall torque.
Here are some references, with a little more detailed information.
PMDC motors
Here’s a great post telling you everything you need to know about PMDC motors, from MachineDesign.com. Keeping the discussion to starting torque, they say this:
Because PM motors lack armature interaction, they can generate high momentary starting and acceleration torques, typically 10 to 12 times full rated torque. Thus, they suit applications requiring high starting torques or momentary bursts of power.
AC motors – Induction and Synchronous
AC motors are brushless, and can either use a magnetic field generated by coils, or by permanent magnets. Here’s the most clear and simple explanation of that, from the Wikipedia:
There are two main types of AC motors, depending on the type of rotor used. The first type is the induction motor or asynchronous motor; this type relies on a small difference in speed between the rotating magnetic field and the rotor to induce rotor current. The second type is the synchronous motor, which does not rely on induction and as a result can rotate exactly at the supply frequency or a sub-multiple of the supply frequency. The magnetic field on the rotor is either generated by current delivered through slip rings or by a permanent magnet.
AC motors are a huge subject, but to keep it to starting torque, go here and read the primer on AC induction motors: Tesla Polyphase Induction Motors on the All About Circuits page. Here’s the graph that got my attention:
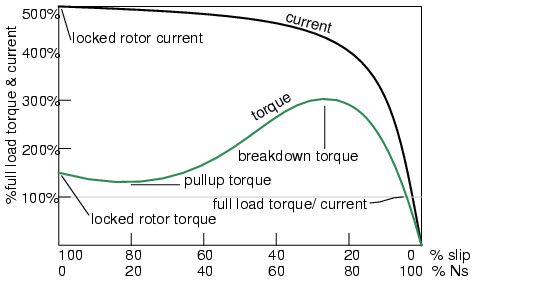
Series-Wound DC motors
There’s a good description of a series-wound DC motor here, on the IMPhotonics page: Parts and Principles of operation of a Series DC Motor:
In series motors stator windings and field windings are connected in series with each other. As a result the field current and armature current are equal. Heavy currents flow directly from the supply to the field windings.
In a series motor electric power is supplied between one end of the series field windings and one end of the armature. When voltage is applied, current flows from power supply terminals through the series winding and armature winding. The large conductors present in the armature and field windings provide the only resistance to the flow of this current. Since these conductors are so large, their resistance is very low. This causes the motor to draw a large amount of current from the power supply. When the large current begins to flow through the field and armature windings, the coils reach saturation that results in the production of strongest magnetic field possible.
The strength of these magnetic fields provides the armature shafts with the greatest amount of torque possible. The large torque causes the armature to begin to spin with the maximum amount of power and the armature starts to rotate.
Here’s the simple explain from here, Engineer’s Edge:
The advantage of a Series Wound Motor is that it develops a large torque and can be operated at low speed. It is a motor that is well-suited for starting heavy loads; it is often used for industrial cranes and winches where very heavy loads must be moved slowly and lighter loads moved more rapidly.
With this graph:

Here’s some more from the Ohio Electric Motors page, with the title, “DC Series Motors – High Starting Torque but No Load Operation Ill Advised”. OK, that about sums it up…
So, yeah, it seems that various motor designs have different characteristics when starting up from zero RPM. What threw me are these motor torque curves I talked about back in this post, here. From those, it looks like, for example, my ME1003 will pull just the same as an AC20 off the line.

For the complete discussion of these curves, go to the elmoto post, here. From the followup I’ve done, I don’t think those take into account the real-world characteristics of breaking that “stall torque” point. To be fair, an AC system is typically (in my experience) heavier as well – maybe up to 10% so. All of those factors will play into the pull off the line, but breaking that first stall is, I’m guessing, huge. Look at it this way – you’re comparing motors that range from being able to start a huge diesel truck from zero RPM, to motors that need capacitors and starting coils just to get themselves spinning up, so naturally it makes sense some motors are going to pull you off the line better than others.
Now, just to try this theory on for size, I looked at the Motenergy data sheets for two basically identical motors – the ME1003, a brushed, PMDC motor, and the ME0913, it’s brushless, PMAC cousin – note, both have permanent magnets. We’re looking at the “Peak Stall Torque”, or, the torque the motor makes when you keep the spindle from turning. On the ME0913, the Peak Stall Torque is 94Nm. On the ME1003, it’s 108Nm. That’s about a 10% difference, which is clearly significant.
There are several great analogies in gas motors, which I was using even before I saw this information. An AC motor feels to me like a multi-cylinder, maybe even turbocharged 4 stroke. It pulls OK, but when it really gets spinning is when you’re going to get the “hellbound train” feeling. My PMDC felt more like my single-cylinder 600cc… good low end, wheelies like you read about, but a limited top-end.
You might even go so far as to say an AC motor is like running a turbocharger – the motor needs to build exhaust pressure before it can deliver intake boost, otherwise known as “turbo lag” – compared to a pulley-off-the-crankshaft supercharger, where as long as the motor is turning it’s delivering boost – more akin to the PMDC or series-DC power delivery.
So, as far as conclusions go, I think it’s an important thing to consider in the whole AC/DC/whatever motor decision – add “stall torque” to RPM, rated torque, HP, watts, weight… and it’s something that contributes greatly to the basic feel of the bike, where the rubber hits the road.
More reading: Check out this page on MachineDesign.com for a complete discussion of AC and PMAC motors.

I have looked into this as well, and here are my thoughts.
1) I believe humans perceive a power delivery; the same acceleration feels “quicker” when travelling at higher speed
2) A small amount more torque feels like “crap tons” more torque when the difference between those two torques causes the front wheel to lift off the ground
3) Most DC controllers give an initial hit of over-current producing much more torque for a short burst when at low speed.
Here is my basis for those thoughts.
1) I have done a great deal of dyno and road data captures of motor torque, motor speed, acceleration and G forces. Motorcycles that have a very linear acceleration (like PMAC motored bikes) feel slow off the line, and feel like they accelerate faster once they are faster than about 15-20mph to almost everybody. All the data collected indicates that the acceleration is actually very linear, and that in fact the motor is producing constant torque. A direct drive motorcycle that has a top speed of around 90mph and top motor speed of 6000RPM will have its motor spinning at around 100RPM at 1.5miles per hour, When the motor is spinning that quickly the controller should have a very good idea of the motor position and will be able to deliver optimal current controlled AC to produce the maximum torque for that current, so there is no reason to have any worse acceleration at 1.5mph than there is at 20mph, once you hit the motor’s base speed (where it goes into field weakening) the torque and acceleration will drop off (and also acceleration will drop off due to aerodynamic drag increases). When I accelerate on a motorcycle, I try and ignore my head, and feel my seat, and sure enough the force between my body and the seat is about the same regardless of speed (between 0-60mph), but if I pay attention to my brain more than my seat, I can feel how it seems to be faster acceleration at higher speed. I think it has to do with fear and wind force. I believe when you are accelerating from a speed at which you are comfortable into a speed where you start to feel a little scared or excited it feels like a big change when actually there was no change at all to the acceleration. I also believe the wind force (and other mental factors) makes you believe you are going really fast, and that a small amount of acceleration makes you think you are going “too fast” even though the increase was pretty small. When I am riding without my gear on, I feel this effect at lower speed than when I ride in my gear, I believe this is all due to “comfort” I am not very comfortable when I ride without my full leathers on. I think anything that pushes your comfort level will make it feel like it accelerates faster than it really does. Some other things that I believe will make something feel “quicker” than it really is are, riding in twisty or otherwise dangerous conditions, riding as a passenger, that sort of thing, anything that makes you feel like you are in less control, or closer to the edge.
2) I believe that like the point I found about the linear acceleration actually feeling like it is getting quicker, I also believe as soon as you can lift the wheel on your bike, you get excited/scarred and that makes it feel like a whole lot more than it was before. I have done tests where a 5% increase in torque made some people think that the torque had doubled, when in fact the difference was small, but it was right on the threshold of being able to lift the front wheel fairly easily with the throttle, and having to help the bike get the front wheel off the ground.
3) Many DC motor controllers have the current sensor on the input to the controller, on the battery side. When the motor is stalled or spinning slowly the battery current will be very low even though the motor current (torque) is really high, once the motor is spinning more quickly and the power increases, the battery side current also increases bringing the current into the range that the sensor is more accurate and the controller will then have a better time controlling the motor current based on the battery current. Also Many DC controllers are speed control, so when you change the throttle position it tries to give everything it has to get you to the new commanded speed, so they give you a big punch initially until you get closer to the desired speed.
-ryan
Thanks for the detailed post, Ryan, and I totally agree. What I learned, though, (and kind of my point, lest it be lost) was that different motor designs have different “starting torque” characteristics. That metric not only affects the feel of the bike’s power delivery, but has an effect on the numbers too, as evidenced by the ETs of my friend’s drag bike.
Comparing my bike, with my PMDC motor, to a Zero, for example, I enjoy riding my bike more, simply because of the higher starting torque of the PMDC motor. All the other performance characteristics are about the same, and the 0-60 times are actually a wee bit better on the Zero.
As a builder trying to understand these things, the “starting torque” isn’t something that’s commonly discussed in making a motor choice.
Ted, you are missing the BIG picture that you did not take into account, and that is these AC motors are connected to electronic controllers that do something special to the AC motors that modify the torque curve. These controllers actually make an AC motor develop peak torque at zero RPM just as you would get with DC motors that do not need electronics to do the same. The simple explanation I can give you is that the controller varies the volts/hertz ratio which in turn “shifts” the torque curve left as you lower the frequency and voltage or right if you raise the frequency and voltage.
Here is a article: http://www.scielo.br/scielo.php?pid=S1678-58782007000100004&script=sci_arttext that explains what the torque curves do for AC motors when connected to a VFD. Notice that you get a “family of torque curves” for various different volts/hertz.
If you have the brain to take on scary mathematics then here is a very thorough article that explains torque control of AC motors that involves some black magic as I call it. WARNING: VERY MATHEMATICAL INTENSE TO UNDERSTAND: http://gauss.fe.uni-lj.si/lep/ips/Projekti/3_Direct%20torque%20control%20of%20PWM%20inverter-fe%20-%20G.%20S.%20Buja.pdf
You have been warned!!! You need a bare minimum of Calculus understanding to fully comprehend this article!!!!
Thanks for those links, and that warning. I ignored it, and have suffered hysterical blindness due to Math Overload Syndrome. 😮
I take your point, but I’m not buying that an AC motor can use the controller to meet or exceed the stall torque of other types. Thus, I’m going to put a comparison together in the next few days – different motor types, comparable continuous power, and look at the starting torques. We’ll see.
hey but what is those series motors?
can’t find any construction picrures or action animation.
Pingback: Electric Motorcycle Review — 2017 Zero DS 13.0 | CleanTechnica·
Pingback: Electric Motorcycle Review — 2017 Zero DS 13.0 – Enjeux énergies et environnement·
Pingback: Basic Motor Types: PMDC, BLDC, AC Induction, Synchronous and Series DC | The Electric Chronicles: Power in Flux·